整车控制器是电动汽车正常行驶的控制中枢,是整车控制系统的核心部件,是纯电动汽车的正常行驶、再生制动能量回收、故障诊断处理和车辆状态监视等功能的主要控制部件。
整车控制器包括硬件和软件两大组成部分,它的核心软件和程序一般由生产厂商研发,而汽车零部件供应商能够提供整车控制器硬件和底层驱动程序。现阶段国外对纯电动汽车整车控制器的研究主要集中在以轮毂电机驱动的纯电动汽车。对于只有一个电机的纯电动汽车通常不配备整车控制器,而是利用电机控制器进行整车控制。国外很多大企业都能够提供成熟的整车控制器方案,如大陆、博世、德尔福等。
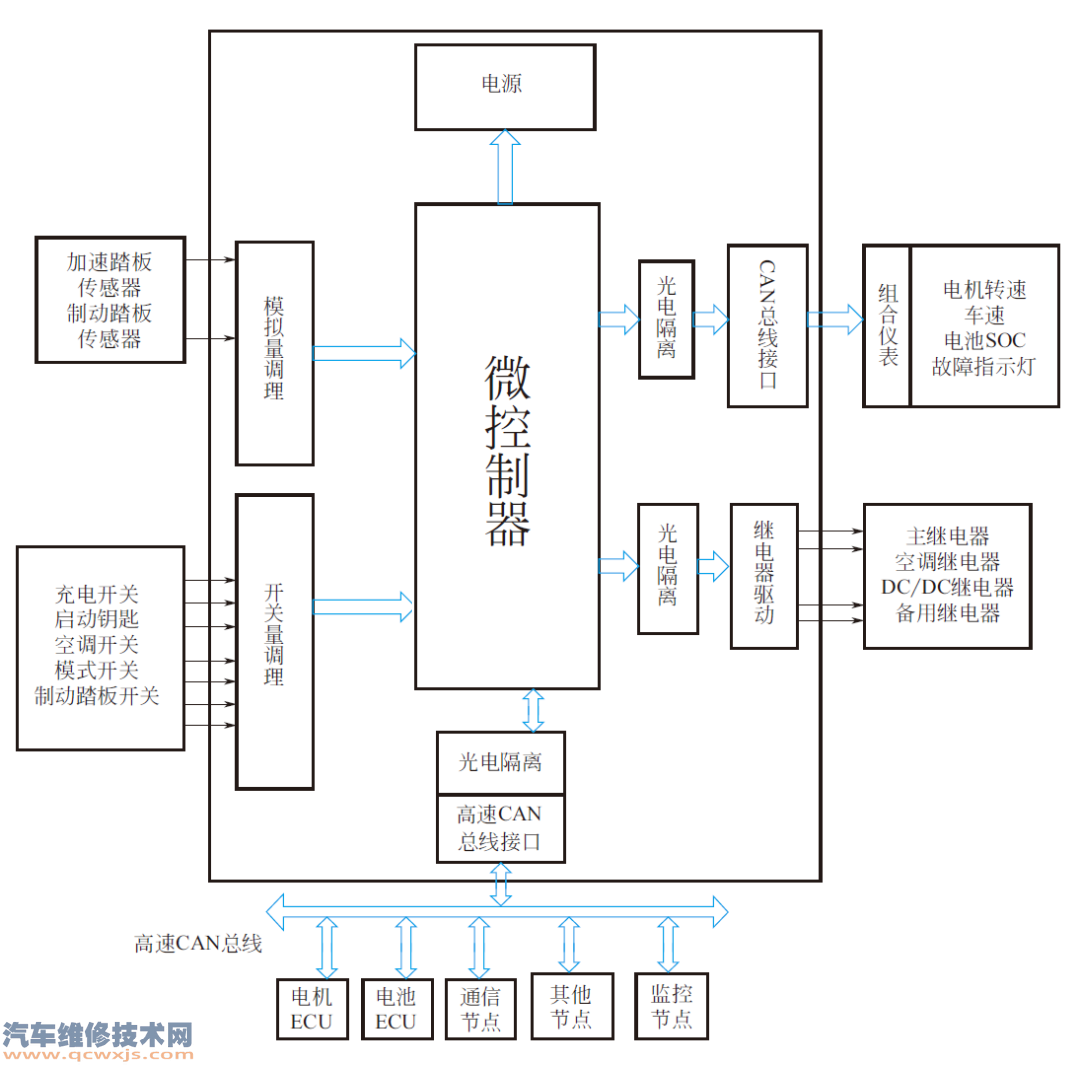
纯电动汽车整车控制系统主要分为集中式控制和分布式控制两种方案。集中式控制系统的基本思想是整车控制器独自完成对输入信号的采集,并根据控制策略对数据进行分析和处理,然后直接对各执行机构发出控制指令,驱动纯电动汽车的正常行驶。集中式控制系统的优点是处理集中、响应快和成本低;缺点是电路复杂,并且不易散热。下图为某公司开发的纯电动汽车整车控制器组成原理图。整车控制器的硬件电路包括微控制器、开关量调理、模拟量调理、继电器驱动、高速CAN总线接口、电源等模块。微控制器模块是整车控制器的核心,综合考虑纯电动汽车整车控制器的功能及其运行的外界环境,微控制器模块应该具有高速的数据处理性能、丰富的硬件接口、低成本和可靠性高的特点。开关量调理模块用于开关输入量的电平转换和整型,其一端与多个开关量传感器相连,另一端与微控制器相接。模拟量调理模块用于采集加速踏板和制动踏板的模拟信号,并输送给微控制器。继电器驱动模块用于驱动多个继电器,其一端通过光电隔离器与微控制器相连,另一端与多个继电器相接。直接向整车控制器发送信号的传感器包括加速踏板传感器、制动踏板传感器和挡位开关,其中加速踏板传感器和制动踏板传感器输出模拟信号,挡位开关输出信号是开关量信号。整车控制器通过向电机控制器、电池管理系统发送指令间接控制驱动电机运转和动力电池充放电,通过控制主继电器来实现车载模块的通断电。根据整车控制网络的构成以及对整车控制器输入和输出信号的分析,整车控制器应满足以下技术要求。① 设计硬件电路时,应该充分考虑电动汽车的行驶环境,注重电磁兼容性,提高抗干扰能力。整车控制器在软硬件上都应该具备一定的自保护能力,以防止极端情况的发生。② 整车控制器需要有足够多的I/O接口,能够快速、准确地采集各种输入信息,至少具备两路A/D转换通道用于采集加速踏板信号和制动踏板信号,应该具有多个开关量输入通道,用于采集汽车挡位信号,同时应该具有多个用于驱动车载继电器的功率驱动信号输出通道。③ 整车控制器应该具备多种通信接口,CAN通信接口用于与电机控制器、电池管理系统和车载信息显示系统通信,RS232通信接口用于与上位机通信,同时预留了一个RS-485/422通信接口,这可以将不支持CAN通信的设备兼容,例如某些型号的车载触摸屏。④ 不同路况条件下,汽车会遇到不同的冲击和振动,整车控制器应该具备良好的抗冲击性,才能保证汽车的可靠性和安全性。
 发布于 10-26 21:50:35
发布于 10-26 21:50:35