 发布于 09-21 12:26:41
发布于 09-21 12:26:41
汽车导航传感器
导航系统用传感器主要有:确定汽车行驶方向的罗盘传感器、陀螺仪、转角传感器等。
用于ABS中的前轮转速传感器也可以被用于汽车导航系统中作为方向传感器。通过对左、右前轮传感器输出的脉冲差(左、右前轮的行驶距离差)的测定,可计算出汽车是否已转向及方向的变化量。
转角传感器(图6-34)位于无线电导航系统的壳体中,记录车辆在行进方向上的左右变化。当车辆改变其行进方向,它绕其垂直轴线转动。转角传感器探测到这个旋转的动作,并通知导航控制单元。导航控制单元然后计算方向改变的角度。为了区分正向和反向运动,控制单元从倒车灯开关接收信号。依旧需要计算行进的距离以计算曲线半径。这由ABS轮速传感器的轮速脉冲帮助确定。
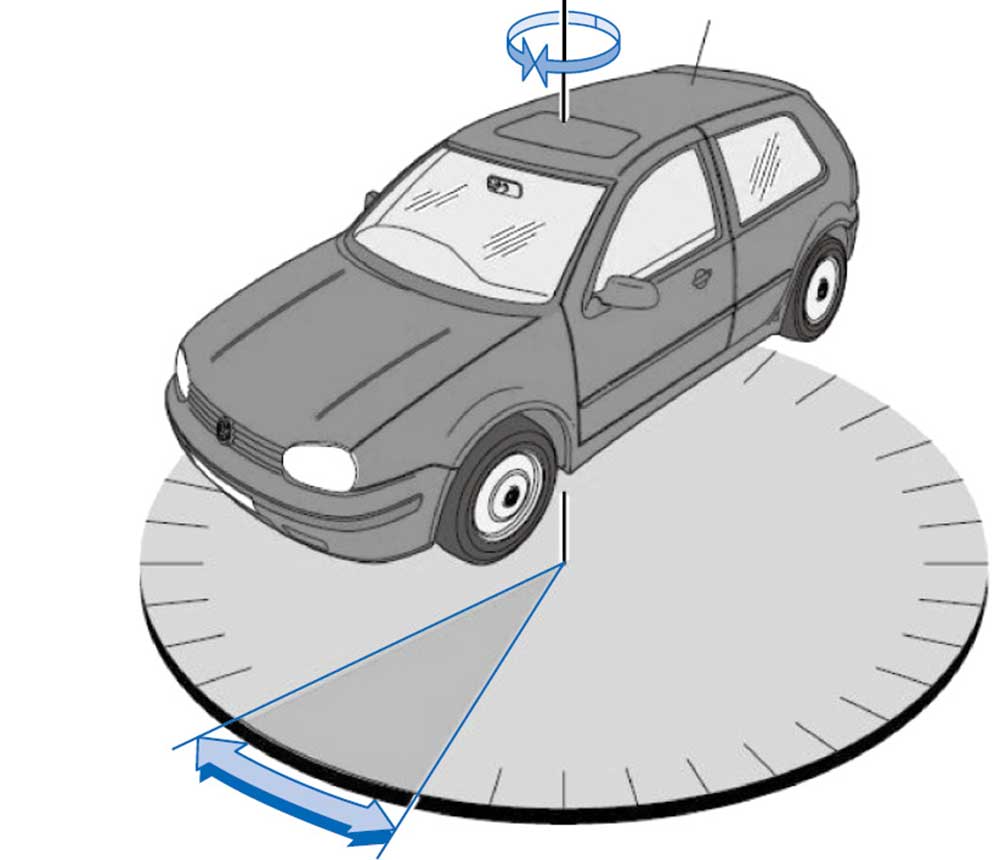
图6-34 转角传感器
采用陀螺仪是检测汽车行驶方向的另一种方法。它是通过测定汽车转向角速度,并对该角速度进行积分来检测方向的变化。目前车用的陀螺仪种类较多,但在汽车导航系统中采用的一般是气体流率差陀螺仪,还有就是光纤维陀螺仪。
罗盘传感器通过对地球磁场的感应来测定汽车的方向。