 发布于 10-23 10:11:09
发布于 10-23 10:11:09
无论是新能源汽车,还是传统发动机车辆都使用到Anti-jerk 功能。只是传统车辆anti-jerk 功能是放在VCU或ECU里面实现,而新能汽车放在MCU或VCU里面实现。于新能源汽车而言,大部分OEM要求MCU具备Anti–Jerk 功能。汽车行驶时,驱动扭矩从动力系统产生,传递到车辆轮边,经历了多个环节。由于部分环节存在弹性元件以及传动链间隙,让本来复杂的动力输出变得更加扑朔迷离。整车驾驶标定过程常会遇到好多驾驶性问题,例如:Tip in Bump、Tip in Shock、Tip in Hesitation、Tip in surge 、Tip in Stumble、Tip in retard 、Tip out Shock、 Tip out Surge等,特别在低附着系数的路面,例如:冰面,更易发生这些问题。然而,这些问题或多或少都牵涉到anti-jerk功能,这是一个神奇的功能,专制各种不服。不过,你若不熟悉它的脾气,它将带给你各种不服、各种意外的惊吓。下面就来介绍Anti-jerk 功能。
1. 防抖的概念
动力传动系统输出扭矩的突变,引起了车速的抖动。为了搞清楚车速怎样抖动的,我们做如下分析,如图1所示,车速的分成:车速恒定量、加速度量和车速抖动量。

图1. 车速的成分
若还未能理解车速的成分的话,那就把车速理解成一种波,是由车速恒定量波、加速度量波和车速抖动量波的三个波形叠加组成。如图2所示。

图2.车速的成分示意图
当防抖功能检测到车速的抖动时,将车速抖动量部分筛选出来,再根据车速抖动量的大小,在参考扭矩上叠加一定量的消抖扭矩,以达到消除速度抖动。如图3所示 。
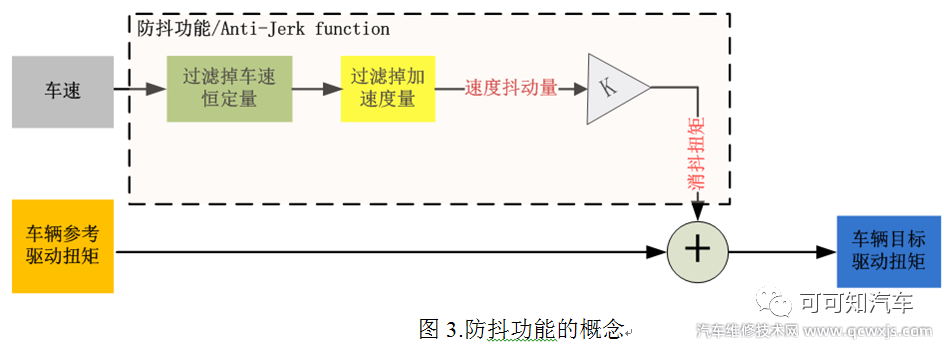
基于上述框图,可将防抖功能理解成:将车速进行滤波,再乘以系数K,得到“消抖扭矩”。因此,防抖功能的关键点在于:
2. 防抖功能的各模块
根据上述防抖功能的概念,我们进一步细分下去,得到防抖功能的各模块,如图4所示。

另外,建模时,还需考虑以下因素:
不同档位,其速比不同,齿轮间隙也不同;离合器滑磨接触引起的速差等因素,都将导致输入信号(即:速信号)被放大或缩小倍率不同,同时带来速度抖动量的放大或缩小倍率不同,故需相应地调整高通滤波器输入信号的放大或缩小倍率。
关于低、高通滤波器资料网上很多,现推荐如下:
http://techteach.no/simview/lowpass_filter/doc/filter_algorithm.pdf
http://hyperphysics.phyastr.gsu.edu/hbase/electric/filcap.html#c2
3. 事例
下面提一个我们遇到的车速抖动工况:车辆行驶在低附着系数路面上,驾驶员急踩油门,TCS系统检测到轮胎出现打滑现象,立刻限制了请求扭矩,这个过程车速出现很大的抖动,如图5所示。稍作标定后车速抖动得到很大改善。
针对anti-jerk功能稍作标定的项目:
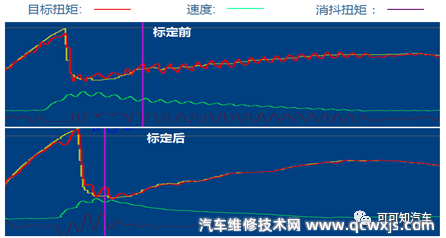
图5.防抖功能标定前后的事例
正如文章开头提到:Anti-jerk function 是个神奇的功能,你若不熟悉它的脾气,它将带给你各种不服、各种意外的惊吓。没有用好它,在某些工况下,反而起到负作用,如图5标定前的效果所示。