 发布于 07-14 19:00:10
发布于 07-14 19:00:10
定速巡航比较原始、可以说绝大多数车辆都配备了这个功能,它的特点就是让车子保持一个特定的车速行驶,亮点则是下坡路时、自动收油,上坡路时、则补油,总之会始终保持预定车速行驶;而自适应巡航则不同,自适应巡航可以根据前方路况对车速进行合理的调整!
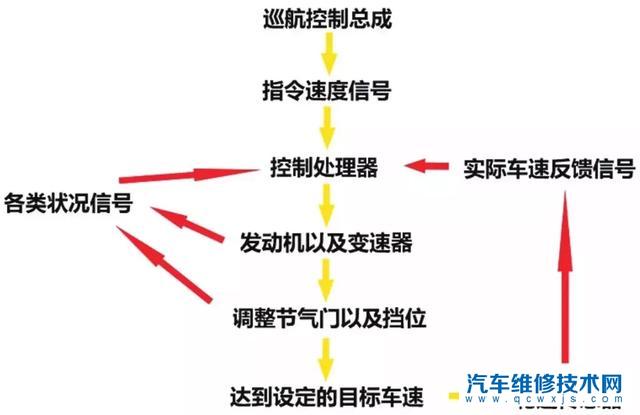
定速巡航是比较老技术、它的实现原理也并不复杂,它实现的方式很简单、先设定一个我们所需求的车速,然后通过各类传感器对车辆运行情况进行掌控,比如精确读取轮速、发动机转速、以及对发动机负荷情况的分析,之后用这些读取的数据、与我们预设的数据进行一定的比对,当系统发现当前数据、高于预设的数据时系统就会减速;而当系统发现当前负荷增加、导致车速低于预设车速时,就会补油保持预设车速(如上坡)!

定速巡航的优点还是很多的,比如它能在长途驾驶中释放我们的脚、让我们不用时刻把脚压在油门上,仅仅需要在减速的时候、带上一脚刹车即可;所以定速巡航是方便的、同理它也是省油的,因为P&G这种高端驾驶技术(猛给油、滑行,不断循环)、只有在理论层面上能做到省油,所以对于普通车友而言、保持匀速行驶最省油,而定速巡航恰恰就很好的做到了这一点,在保持车辆匀速行驶的过程中、还能有效限制车速防止车辆超速行驶;定速巡航的标识(开关)就是如上图所示!

自适应巡航要比定速巡航灵活很多,这是一套依靠各种雷达、传感器所打造的系统;开启自适应巡航之后,车辆会根据前方车辆、与本车的实际状态(比如车速、比如车间距),对于自身车速进行调整,比如说前方车辆跑得比较快、那么自适应巡航也会提高速度,而前方车辆如果车速降低、那么自适应巡航也会相应的降低车速;所以与定速巡航相比、自适应巡航连刹车都替你踩了,毕竟定速巡航是需要车主去踩刹车的!

除此之外构成自适应巡航体系、必然会配备车道保持系统,这个功能可以让车子规规矩矩的在线内行驶(前提是行车线清晰、得让车载雷达识别得到),这样一来开启自适应巡航后的车子既可以自动提速、刹车,又能保持车道内行驶,连您的双手都释放了;定速巡航必须要时刻扶方向盘、因为它不会调整方向,而自适应巡航只要在有行车线的路况上,就能沿着车道走、实际上已经具备了控制方向的能力,而定速巡航则做不到这些!

上述就是自适应、定速巡航存在的差异,定速巡航可简单理解成系统在帮驾驶者踩油门,而刹车、方向系统不管;而ACC自适应巡航开启之后,车子能自动加速、自动提速(车速不恒定)、自动保持车间距、会踩刹车、能控制方向,这就是ACC的强势之处!ACC开启状态下的车子其实已经有了点自动驾驶的味道,只不过缺乏足够的逻辑判断能力、以及车载雷达的视力夜达不到自动驾驶的要求,不过ACC自适应巡航还是要比定速巡航更方便一些,它能完成的工作也要多上一些!